Designing a Kubernetes Cluster for High Availability and Fast Recovery
Running Kubernetes and running Kubernetes reliably are two different disciplines. The gap shows up the first time a control plane node goes down, an etcd quorum breaks, or a misconfigured pod disruption budget takes out a critical service during a node drain.
Designing a Kubernetes cluster for high availability requires decisions made before the first workload ships, not after the first outage.
This guide covers the architecture patterns that eliminate single points of failure, the configuration choices that determine recovery speed, and what production-grade Kubernetes clusters look like when they have to survive real failure scenarios.
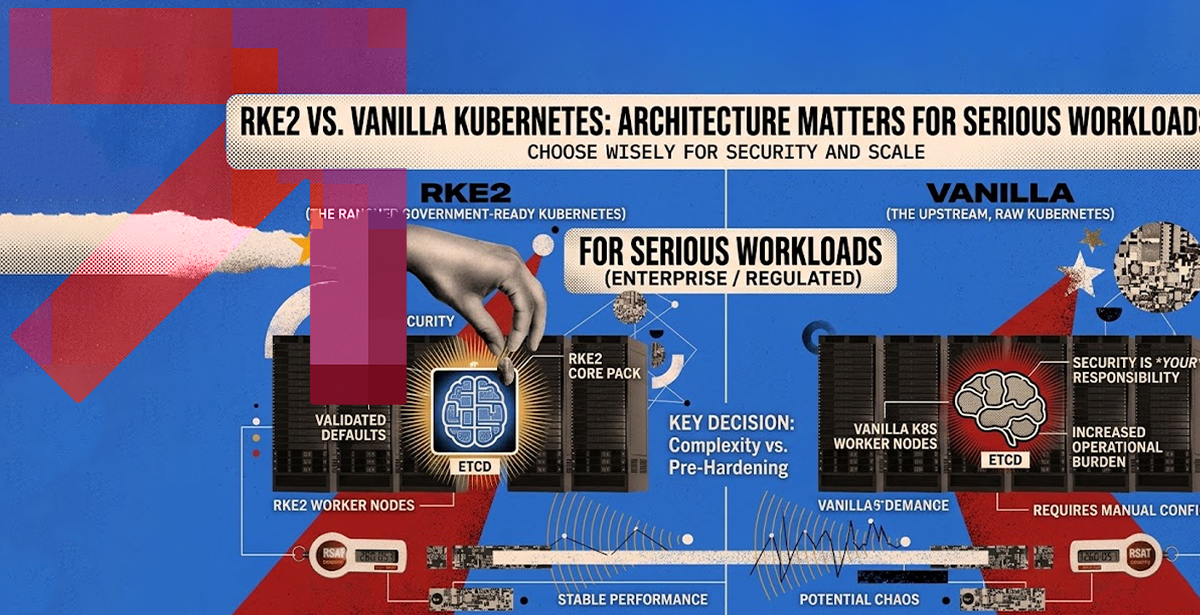
💡 When evaluating Kubernetes platforms, don’t focus solely on features—consider the operational model. Kubernetes architecture choices such as RKE2 vs. Vanilla Kubernetes can impact security, compliance, lifecycle management, and day-to-day administration. For production environments and regulated workloads, the underlying Kubernetes architecture often has as much influence on reliability and scalability as the applications running on it.
What High Availability Actually Means in a Kubernetes Cluster
High availability (HA) in Kubernetes isn’t a single toggle. It’s a set of overlapping decisions, each of which eliminates a different class of failure.
A true HA Kubernetes architecture has three components:
- Control plane redundancy (so no single master node failure kills the cluster)
- Worker node resilience (so pod workloads survive node failure)
- Data plane continuity (so in-flight traffic doesn’t drop while rescheduling happens)
According to the CNCF Annual Survey, Kubernetes production adoption is now the majority across organizations globally. The challenge has shifted from getting clusters running to running them reliably.
You can have a highly available control plane and still take downtime if your pods lack liveness probes or your services lack readiness gates. HA means all three layers working together.
Control Plane Architecture: The Foundation of Availability
The control plane is where most Kubernetes outages start. One master node is a single point of failure. The minimum viable HA configuration is three control plane nodes with stacked etcd, giving you quorum tolerance for one node failure without losing cluster state.
The etcd layer deserves particular attention. etcd is Kubernetes’ source of truth for all cluster state.
Running etcd on the same nodes as the API server (stacked topology) simplifies operations.
Running it on dedicated nodes (external topology) gives you independent scaling and better failure isolation. Both are viable — the right choice depends on cluster scale and operational complexity tolerance.
Beyond node count, Kubernetes management for HA control planes requires automated etcd backups, leader election tuning, and a load balancer in front of the API server. Without that load balancer, your CI/CD pipelines and workloads have no stable endpoint when master failover happens.
Worker Node and Pod Design for Resilience
A resilient worker node configuration starts with pod anti-affinity rules. If two replicas of the same service land on the same node and that node fails, both replicas go down together. Anti-affinity policies spread workloads across nodes and, in multi-zone deployments, across availability zones.
Pod Disruption Budgets (PDBs) are the other mechanism most teams configure too late. A PDB defines the minimum number of pods that must stay available during voluntary disruptions like node drains or rolling updates. Without one, a cluster upgrade can inadvertently drop a service below its availability threshold.
Kubernetes orchestration also means getting resource limits right.
Kubernetes pods without CPU and memory limits can starve neighboring workloads on the same node. The Horizontal Pod Autoscaler handles scale-out, but it only works reliably when resource requests are accurate. Getting requests and limits right is foundational to stable, predictable cluster behavior.
Fast Recovery: The Metrics That Define It
High availability reduces the frequency of outages. Fast recovery determines their impact.
The two metrics that matter most are RTO (Recovery Time Objective) and MTTR (Mean Time to Recovery). Both are determined by architecture decisions made before incidents happen.
Liveness probes define when a pod should be restarted. Readiness probes define when it should receive traffic. Neither is optional in a production kubernetes cluster. Without them, Kubernetes can’t distinguish a crashed container from one that is still starting up, and traffic routes to dead pods.
Node auto-repair combined with cluster autoscaler policies handles hardware failure recovery automatically. According to Kubernetes’ official production environment documentation, consistent probe configuration and autoscaling policies are the baseline for any cluster targeting sub-five-minute MTTR. If you skip those, you’re manually setting a higher floor for your recovery time.
What Production-Grade Kubernetes Architecture Looks Like
Two deployments show the range of environments where these patterns hold.
For the Pakistan Air Force, DPL deployed a fully air-gapped Kubernetes cluster using RKE2/Rancher with zero external internet connectivity, a multi-master HA control plane, and Istio service mesh for encrypted east-west traffic between 100-plus containerized microservices.
Falco runtime security and Trivy vulnerability scanning ran inside the cluster. Recovery from node failure averaged under five minutes. The cluster maintained 99.95% availability, and deployments moved from monthly to multiple per day after CI/CD pipeline integration.
For MENA Assistance (CarPal), DPL built a GKE-based platform handling roadside assistance across 15-plus countries. Horizontal pod autoscaling absorbed 10x traffic spikes during emergencies without manual intervention.
Cloud SQL regional HA covered the data layer. Operational complexity dropped 60% compared to the prior infrastructure.
Both cases are the direct result of deliberate Kubernetes architecture decisions made before launch, not patched in after the first incident.
Kubernetes Management at Scale
Running one HA cluster is an engineering problem. Running several is an operational one.
Multi-cluster Kubernetes management requires namespace-level RBAC policies, centralized observability across clusters with Prometheus and Grafana, and standardized deployment pipelines that behave consistently across environments.
Rancher provides a unified control plane for multi-cluster operations. GitOps tooling enforces configuration consistency so cluster drift doesn’t quietly introduce failure modes between release cycles.
FAQ: Kubernetes Cluster Design
How many control plane nodes are needed for a highly available Kubernetes cluster?
Three is the minimum. With three control plane nodes running stacked etcd, the cluster tolerates one node failure without losing scheduling capability. Five nodes tolerate two simultaneous failures, which is appropriate for clusters running regulated or mission-critical workloads.
What is the difference between liveness and readiness probes?
A liveness probe determines whether a container should be restarted. A readiness probe determines whether a pod should receive traffic. Both are required for fast recovery: liveness handles crashed containers, readiness handles containers that are starting up or temporarily degraded.
Conclusion
A Kubernetes cluster designed for high availability isn’t necessarily a complex one. It’s just designed with failure in mind from the start.
The patterns are well-understood: multi-master control plane, etcd redundancy, pod anti-affinity, disruption budgets, accurate resource limits, and probe configuration. What varies is whether teams implement them before an incident or after one.
DPL designs and operates Kubernetes infrastructure for defense organizations, enterprise platforms, and global consumer products. Explore DPL’s container orchestration services to see how we approach it.